Kalman filter学习笔记
前言
本文纯属笔记且未完成,巨坑,不具参考性。
应用
前置知识点
运动模型
运动模型可以分为
- 一次运动模型
- CV: 匀速模型(Constant Velocity)
- CA: 匀加速模型(Constant Acceleration)
- 二次运动模型
- CTRV: 恒定转弯率和速度幅度模型(Constant Turn Rate and Velocity)
- CTRA: 恒定转动率和加速度
- CSAV: 恒定转向角和速度
- CCA: 恒定曲率和加速度(Constant Curvature and Acceleration)
匀速模型例子
系统状态方程
x^k=Ax^k−1+wk−1
- x^k: 第k次预测值
- wk−1: 过程误差协方差矩阵, 符合期望为0,协方差为Q的正态分布 P(w)∼N(0,Q)
- A: 状态转移矩阵
观测/测量方程
zk=Hxk+vk
- xk: 第k次观测值
- vk: 测量误差协方差矩阵, 符合期望为0,协方差为R的正态分布 P(v)∼N(0,R)
- H: 测量矩阵
计算步骤
Predication
x^kˉ=Ax^k−1
Pkˉ=APk−1AT+Q
P: 状态协方差矩阵(state covariance matrix)
在使用时协方差矩阵P是一个迭代更新的量,每一轮预测和更新后,P都会更新一个新的值,因此初始化时可以根据估计协定,不用太苛求初始化的精准度,因为随着几轮迭代会越来越趋紧真实值。
Measurement update
Kk=PkˉHT(HPkˉ−1HT+R)−1
x^k=x^kˉ+Kk(Zk−Hx^kˉ)
Pk=(I−KkH)Pkˉ
数据融合
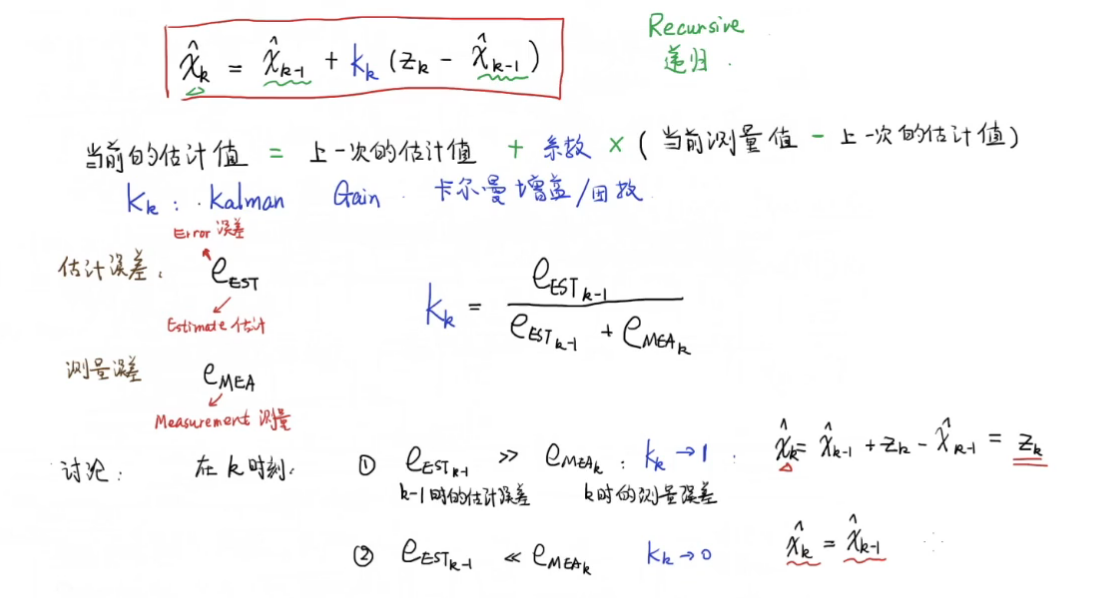
X^k=X^k−1+Kk∗(Zk−X^k−1)
- X^: 当前估计值
- X^k−1: 前一次估计值
- Zk: 当前测量值
- Kk: Kalman Gain,卡尔曼增益/卡尔曼系数
Kk=eESTk−1+eMEAkeESTk−1
其中:
- eEST: Error estimate, 估计误差
- eMEA: Error measurement, 测量误差
eMEA一般由测量工具得出(传感器等)
当K=0时,eEST和X^可以为任何值,它将会在K=1时更新。
在K时刻
- 当eEST≫eMEA, 则 Kk→1, Xk=Zk
- 当eEST≪eMEA, 则 Kk→0, Xk=Xk−1
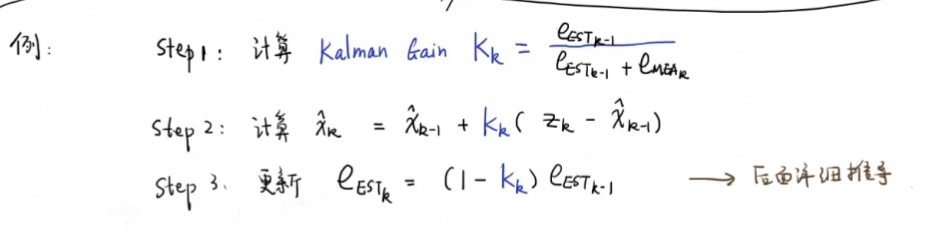
计算步骤
- K=0初始化eEST, X^, Zk, eMEA可忽略
- K = K + 1
- 根据eMEA和eESTk−1计算Kk
- 从eMEA和Zk计算k^
- 更新eESTk
- 重复2
Python代码
这里假设e_measurement不跟随k而变化
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| import numpy as np
def kalman(xhat_prev, e_estimate_prev, e_measurement, zk):
kalman_gain = e_estimate_prev / (e_estimate_prev + e_measurement)
xhat = xhat_prev + kalman_gain * (zk - xhat_prev)
e_estimate = (1 - kalman_gain) * e_estimate_prev
return xhat, e_estimate
def kalman_filter(zk: np.array, e_measurement, e_estimate0):
e_estimate = e_estimate0
r = np.ndarray(len(zk) + 1, np.float32)
r[0] = 0
for i in range(0, len(zk)):
r[i + 1], e_estimate = kalman(r[i], e_estimate, e_measurement, zk[i])
return r
|
Excel
自己做了一份DR_CAN视频中数据融合excel, 点此下载
Reference